Visualizing Samian
3D-Scanning
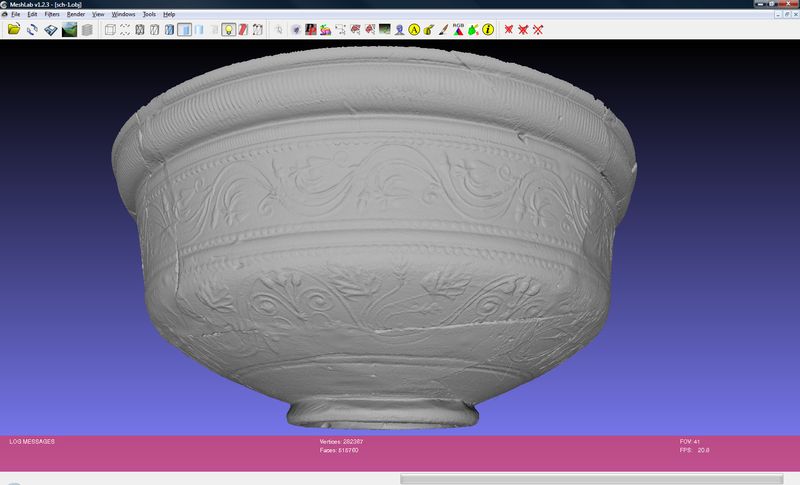
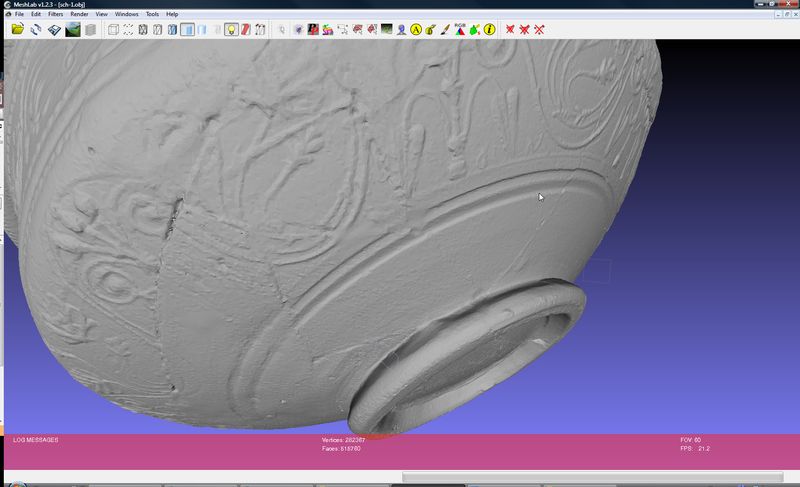
Back in 2003, the Römisch-Germanisches Zentralmuseum in Mainz started using close-range 3D-Scanners to record the geometry of Samian Vessels. The scanner used is an industrial measurement system using structured light projection. The point spacing is approx. 0.6 mm, the accuracy approx. 0.1 mm. The result is a triangulated mesh of the surface. The data can then be visualized with varying light directions, rotated, zoomed, etc. using freely available viewers. To replace traditional flat drawings, parts of the object were transformed using flattening projection. The software used to apply these conic projections to the datasets was coded by Guido Heinz of the RGZM.



left: Samian bowl from Wiesbaden, mould signed by Modestus. View within MeshLab.
right: Detail of flattened projection of upper zone from Samian bowl. After PhotoShop image processing
Reflectance Transformation Imaging
Another way to present objects with varying surface illuminations is Reflectance Transformation Imaging (RTI) (see http://culturalheritageimaging.org/Technologies/RTI/). Standard DSLR Camera equipment with a movable flash device, a snooker ball and some freely available software tools for non-commercial applications is all one needs. A set of images is taken with light from different directions and merged into a dataset containing the texture and reflectance information. This very time and cost effective method can be used to record Samian stamps. The light direction and additional illumination parameters can be modified interactively in a browser based viewer.



click on stamp image to start ptm viewer (requires WebGL enabled browser)